#202-A
제조 (Manufacturing)
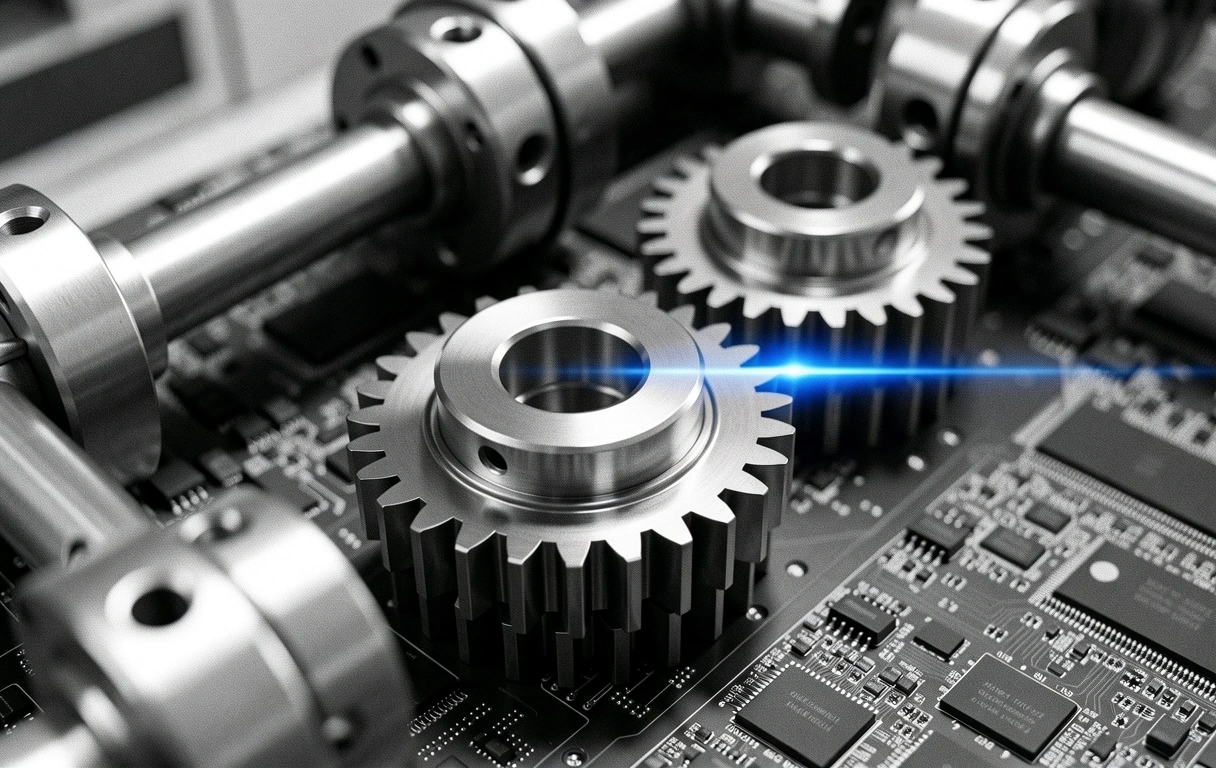
초정밀 전자부품
조립 라인 로보틱스
기존 수동 조립 공정의 불량률 개선을 위해 최첨단 비전 센서와 협동 로봇을 통합하였습니다. 0.01mm 오차 범위 내의 정밀 제어를 구현했습니다.
핵심 과제
부품 파손 및 정밀도 저하
해결 방안
AI 비전 기반 보정 알고리즘

실제 산업 현장에서 검증된 엔지니어링 기록. 단순한 장비 도입을 넘어 논리적인 프로세스 최적화를 통해 달성한 Tavargoat의 기술적 성과를 공개합니다.
기존 수동 조립 공정의 불량률 개선을 위해 최첨단 비전 센서와 협동 로봇을 통합하였습니다. 0.01mm 오차 범위 내의 정밀 제어를 구현했습니다.
멀티 AGV 운용 시 발생하는 경로 충돌과 병목 현상을 해결하기 위해 독자적인 스케줄링 알고리즘을 도입, 배터리 효율과 이동 효율을 24% 향상시켰습니다.
노후화된 데이터베이스 시스템과 현대적 API를 연결하는 지능형 미들웨어를 구축하여 수작업 데이터 입력을 제거하고 정합성을 확보했습니다.
단순히 기계를 도입하는 것은 자동화가 아닙니다. Tavargoat는 환경의 변화를 감지하고 스스로 대응하는 '지능형 로직'을 통해 산업 최적화의 기준을 바꿉니다.
오프셋 보정 및 환경 변화에 따른 실시간 변수 조절 기능 기본 탑재.
물리적 설치 전 디지털 트윈(Digital Twin)을 통한 리스크 제로 구현.
| 평가 기준 | 표준 자동화 | LAB 최적화 |
|---|---|---|
| 오류 대응력 | 시스템 정지 | 자동 궤도 수정 |
| 데이터 연동 | 단방향 출력 | ERP 양방향 동기 |
| 셋업 시간 | 현장 반복 조정 | 사전 시뮬레이션 |
Tavargoat Automation Labs의 모든 프로젝트는 단순한 구현을 넘어 엄격한 검증 단계를 거칩니다. 시뮬레이션부터 현장 안정화까지 당사의 신뢰성 확보 프로세스를 확인하십시오.
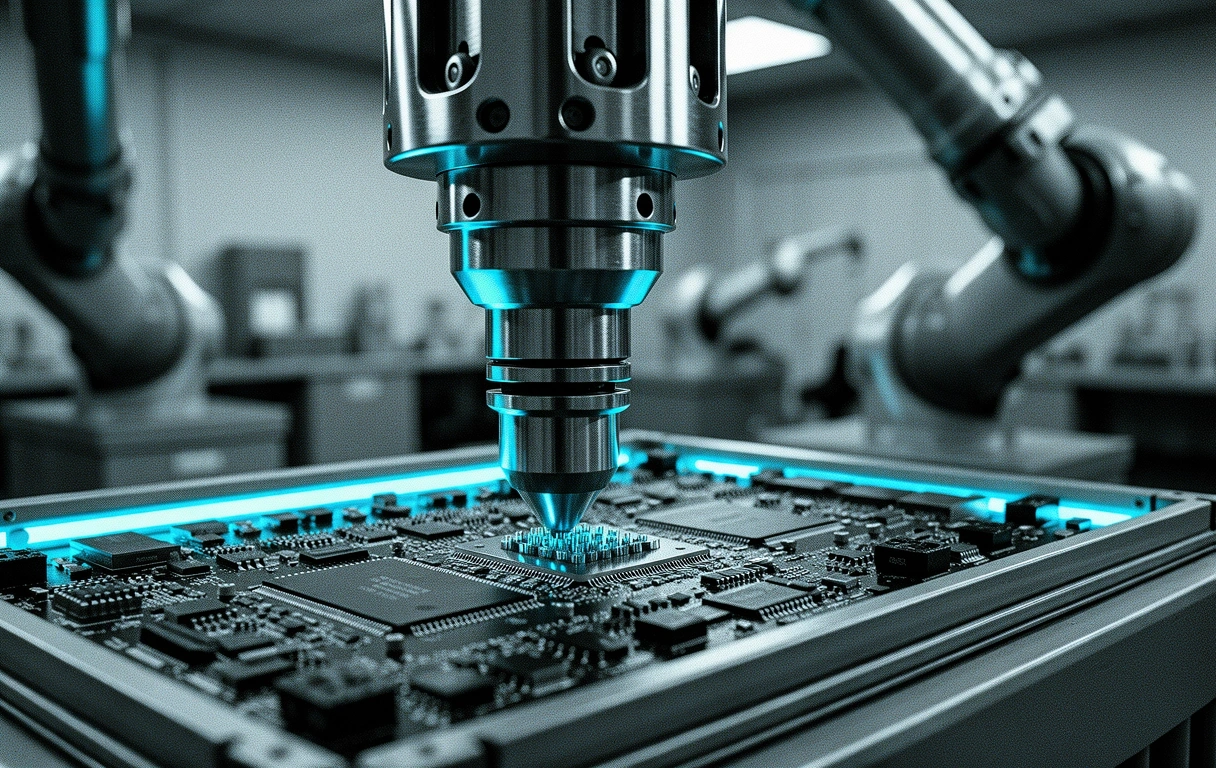
실제 구현 사례: 반도체 후공정 검사 라인